The prototype robotic platform has been shown to be able to navigate construction sites and carry out specific activities.
The robot is designed to deliver construction activities that may otherwise be repetitive or potentially hazardous, such as drilling at height. As a first proof of concept, the project focused on a drilling and anchor insertion application which was trialled on a live construction site at Skanska’s Featherstone Building project in central London.
The Collaborative On-Site Construction Robot (COSCR) project is an Innovate UK project that brings together factory automation and robotics expertise from HAL Robotics, ABB and InnoTecUK, together with project management expertise from the Building Research Establishment, site access and product experience from Skyjack and construction industry insight from Skanska.
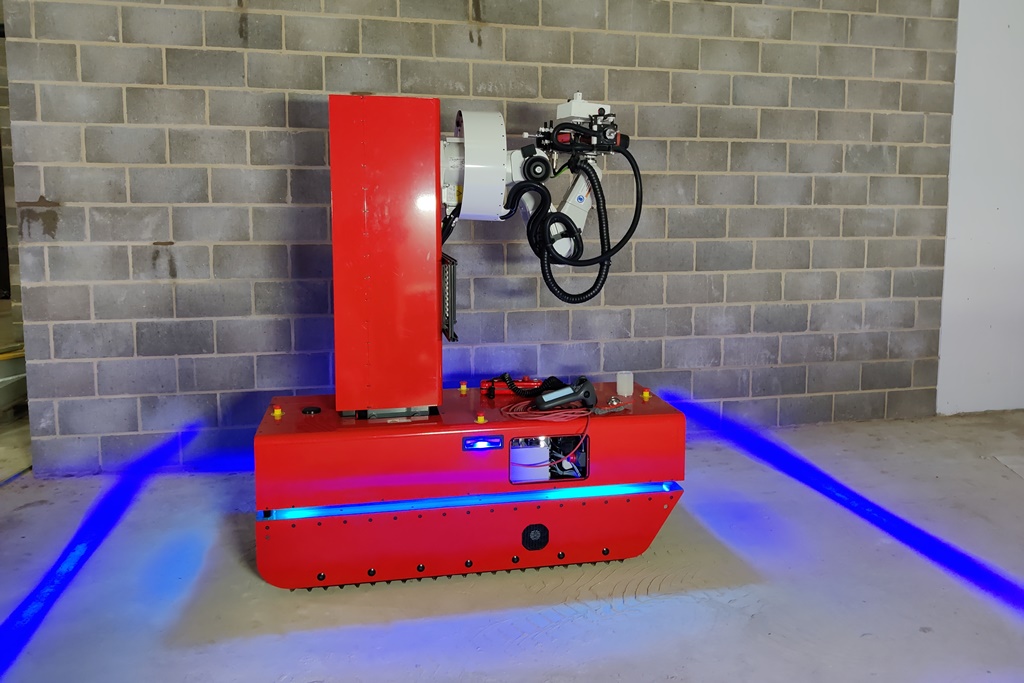
The COSCR platform comprises a mobile base, site sensing technology and BIM-linked software systems that enable it to navigate around a construction site.
COSCR can be operated manually or autonomously. In manual mode, an operator uses a cable controller to move the robot around the site. In autonomous mode, the robot uses its onboard sensors, as well as maps derived from building information modelling (BIM) data, to navigate itself around the site and perform tasks that have been scheduled by the user.
The robot has been developed to specific size and weight constraints to maximise its potential to access the tightest corners of any site. The platform is tracked, which enhances manoeuvrability, and has a telescopic mast fitted with a robotic arm, enabling it to reach heights of up to 4.2 metres.
Skanska UK’s head of innovation, Vaibhav Tyagi, said: “Advancing the use of robotics in construction has the potential to deliver huge benefits, both in terms of safety and productivity. By automating tasks that are repetitive or present some degree of risk, such as working at height, we can protect our people, while improving the accuracy, speed and quality of the task.”
Sebastian Andraos, director of HAL Robotics, the lead party in the consortium, said: “The COSCR project has combined the expertise of the whole consortium to develop a versatile platform for on-site automation tasks. We firmly believe that COSCR platforms, and others like it, have a place on construction sites in the near future and have worked to ensure we understand the standards that must be met to allow that to happen.
“The platform itself and the control systems around it have been designed in a generalisable way to ensure that we can operate alternative tasks, such as logistics, painting, inspection etc, and control multiple robots working on the same site with ease.”
Got a story? Email news@theconstructionindex.co.uk